I. Introduction and Autoencoder
- Many applications such as image synthesis, denoising, super-resolution, speech synthesis or compression, require to go beyond classification and regression and model explicitly a high-dimensional signal.
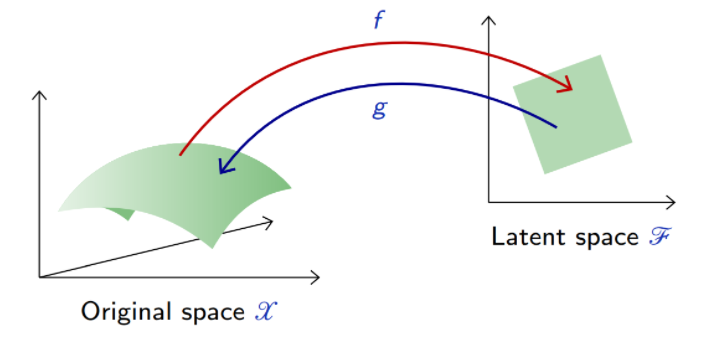
- This modeling consists of finding “meaningful degrees of freedom”, or “factors of variations”, that describe the signal and are of lesser dimension.
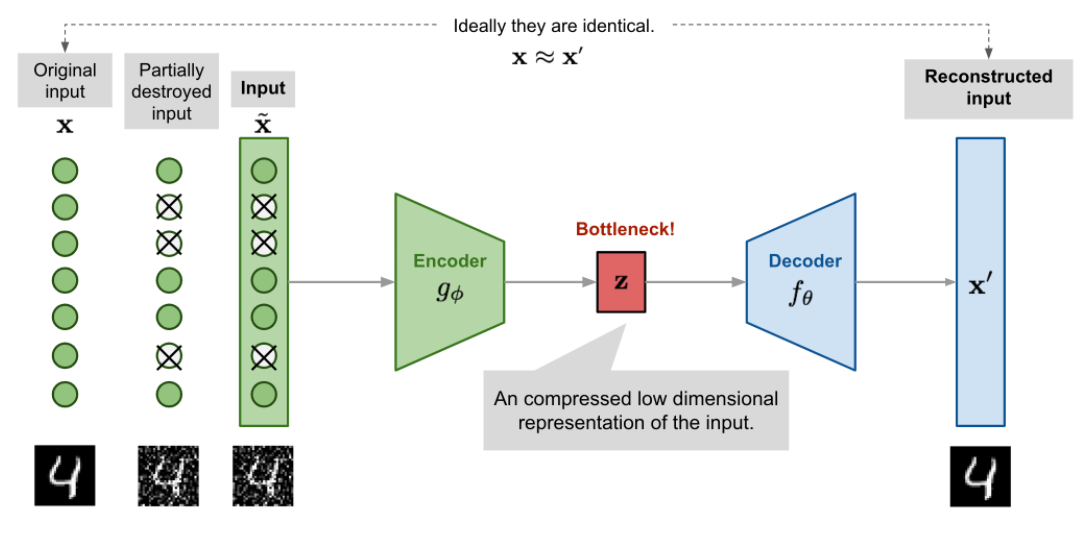
- Autoencoders are an unsupervised learning technique in which we leverage neural networks for the task of representation learning. Specifically, we’ll design a neural network architecture such that we impose a bottleneck in the network which forces a compressed knowledge representation of the original input.
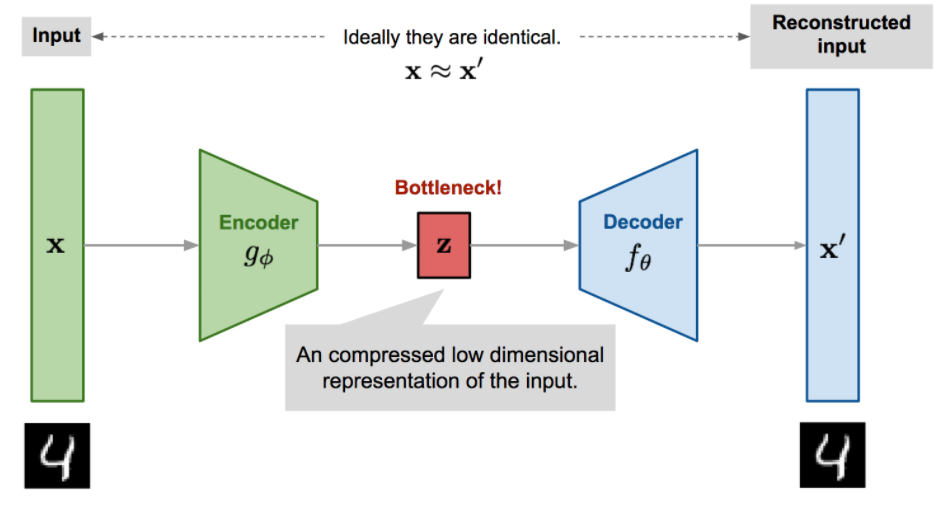
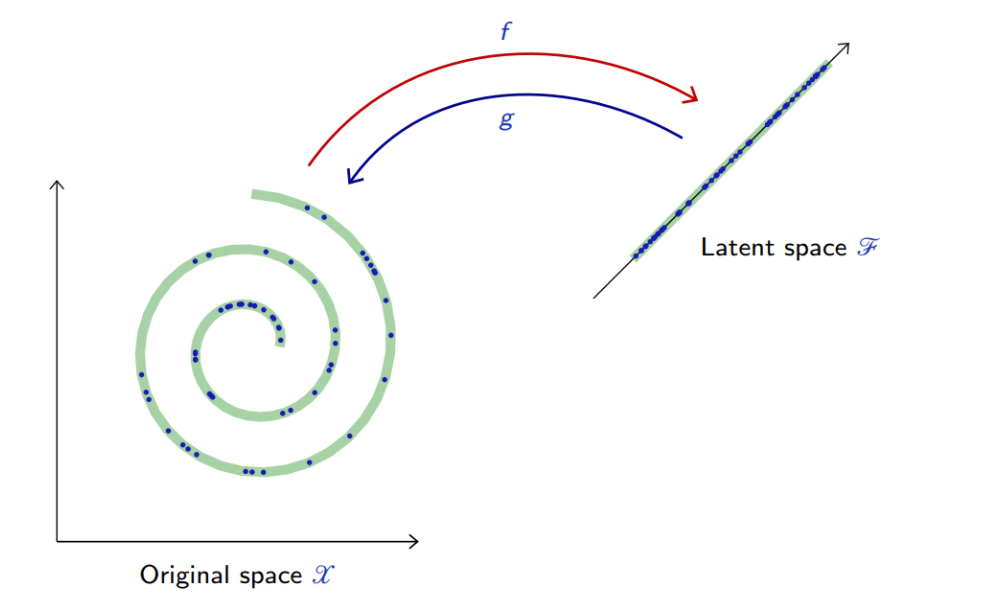
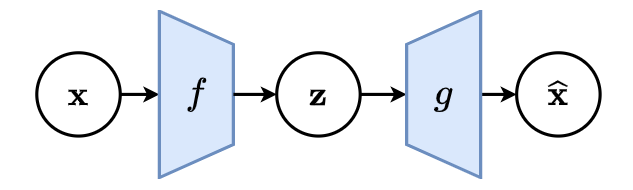
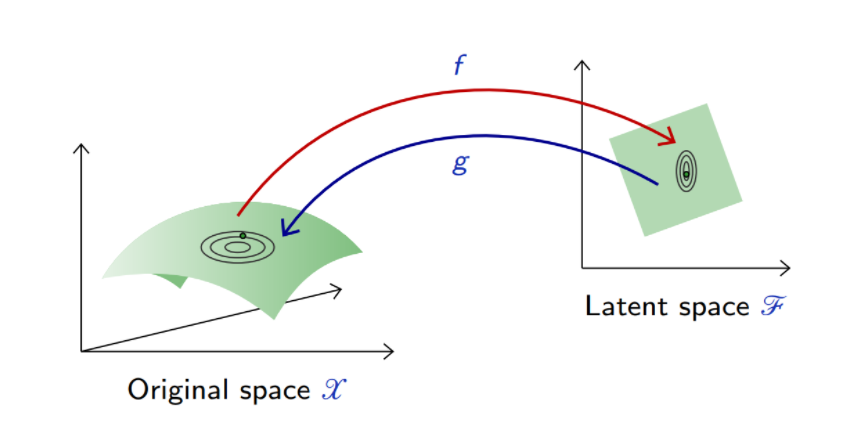
Mathematically, an Autoencoder is a composite function made of
- an encoder
from the original space
to a latent space
,
- a decoder
to map back to
such that is close to the identity on the data.
Let be the data distribution over
. A good auto-encoder could be characterized with the reconstruction loss
Given two parameterized mappings training consists of minimizing an empirical estimate of that loss
For example, when the auto-encoder is linear,
with the reconstruction error reduces to
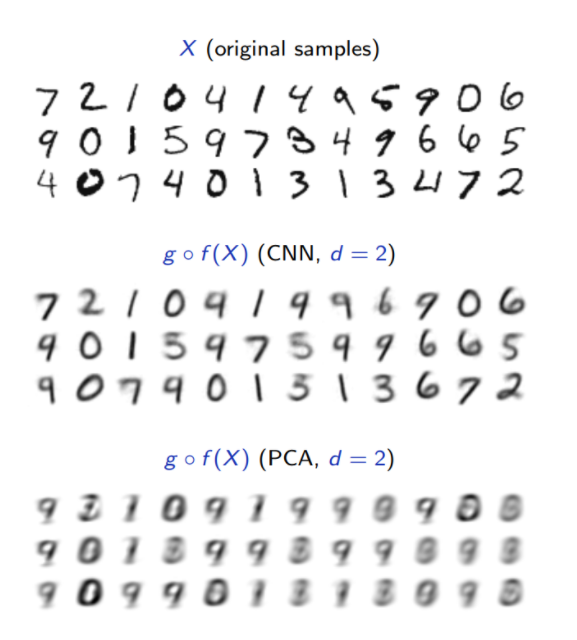
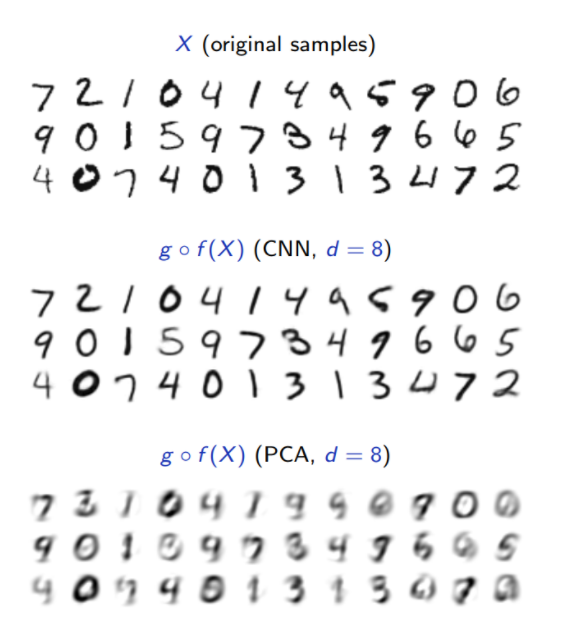
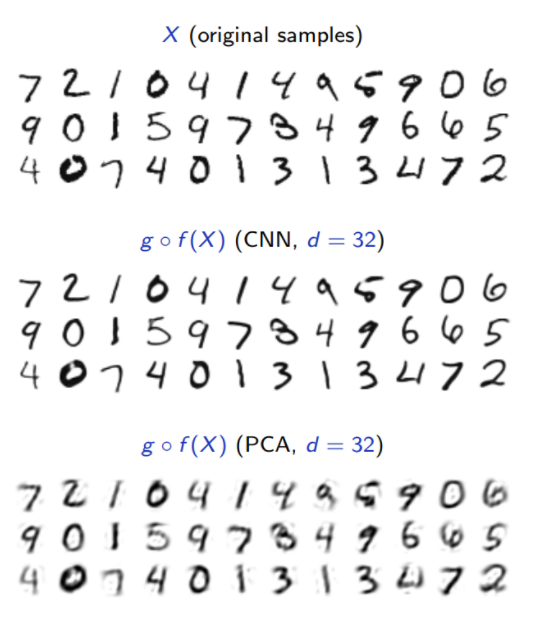
In this case, an optimal solution is given by PCA.
Deep auto-encoders
Better results can be achieved with more sophisticated classes of mappings than linear projections: use deep neural networks for and
.
For instance,
- by combining a multi-layer perceptron encoder
with a multi-layer perceptron decoder
- by combining a convolutional network encoder
with a decoder
composed of the reciprocal transposed convolutional layers.
Compare Autoencoder with PCA on MNIST dataset
Denoising Autoencoder
Since the autoencoder learns the identity function, we are facing the risk of “overfitting” when there are more network parameters than the number of data points.
To avoid overfitting and improve the robustness, Denoising Autoencoder (Vincent et al. 2008) proposed a modification to the basic autoencoder. The input is partially corrupted by adding noises to or masking some values of the input vector in a stochastic manner, . Then the model is trained to recover the original input (note: not the corrupt one).
where defines the mapping from the true data samples to the noisy or corrupted ones.
 Sampling from an AE’s latent space
Sampling from an AE’s latent space
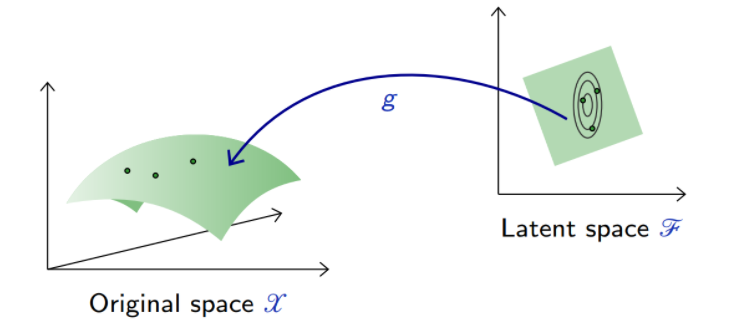
The generative capability of the decoder in an auto-encoder can be assessed by introducing a (simple) density model
over the latent space
, sample there, and map the samples into the data space
with
.
For instance, a factored Gaussian model with diagonal covariance matrix,
where both are estimated on training data.
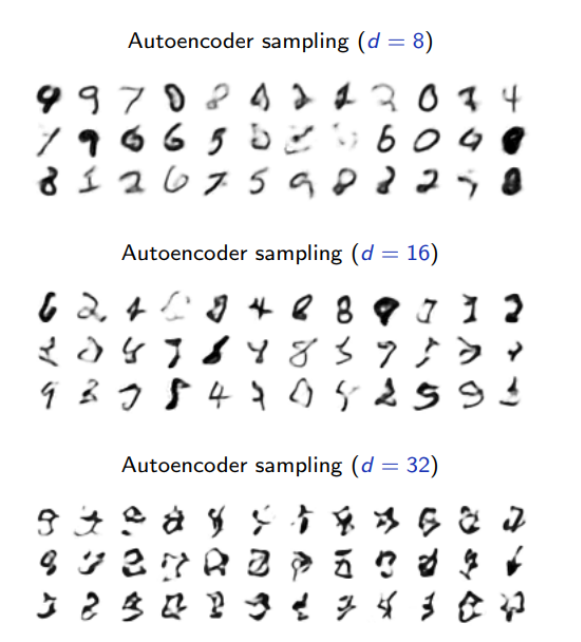
These results are not satisfactory because the density model on the latent space is too simple and inadequate.
Building a good model in latent space amounts to our original problem of modeling an empirical distribution, although it may now be in a lower dimension space.
II. Variational Inference
Latent variable model
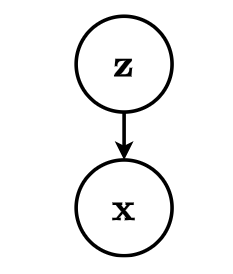
Consider for now a prescribed latent variable model that relates a set of observable variables to a set of unobserved variables
.
The probabilistic model defines a joint probability distribution , which decomposes as
For a given model , inference consists in computing the posterior
For most interesting cases, this is usually intractable since it requires evaluating the evidence
: Intractable!
Variational inference turns posterior inference into an optimization problem.
- Consider a family of distributions
that approximate the posterior
, where the variational parameters
index the family of distributions.
- The parameters
and the posterior
Formally, we want to solve
For the same reason as before, the KL divergence cannot be directly minimized because of the term.
However, we can write
where is called the evidence lower bound objective.
- Since
does not depend on
- Given a dataset
, the final objective is the sum
Remark that
Therefore, maximizing the ELBO:
- encourages distributions to place their mass on configurations of latent variables that explain the observed data (first term);
- encourages distributions close to the prior (second term).
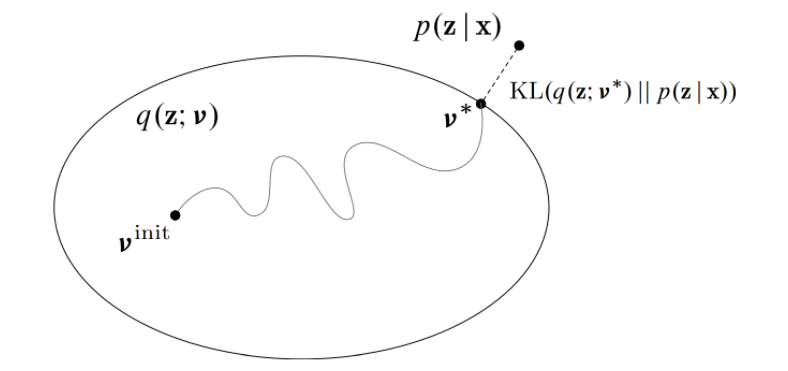
Optimization
We want
We can proceed by gradient ascent, provided we can evaluate.
Evidence Lower Bound (ELBO)
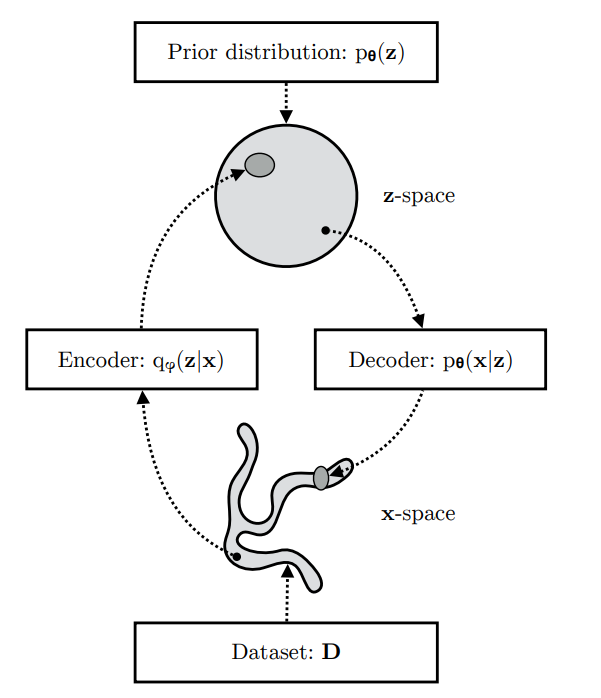
- A VAE learns stochastic mappings between an observed
-space, whose empirical distribution
is typically complicated, and a latent
-space, whose distribution can be relatively simple (such as spherical).
- The generative model learns a joint distribution
that is often (but not always) factorized as
, with a prior distribution over latent space
, and a schotastic decoder
. The schochastic encoder
also called inference model, approximates the true but intractable posterior
of the generative model.
The second term is the Kullback-Leibler (KL) divergence
between and
, which is non-negative:
and zero if, and only if, equals the true posterior distribution.
The first term is the variational lower bound, also called
the evidence lower bound (ELBO):
Due to the non-negativity of the KL divergence, the ELBO is a lower bound on the log-likelihood of the data.
So, interestingly, the KL divergence determines
two ’distances’:
- By definition, the KL divergence of the approximate posterior from the true posterior;
- The gap between the ELBO
and the marginal likelihood
; this is also called the tightness of the bound. The better
approximates the true (posterior) distribution
, in terms of the KL divergence, the smaller the gap.
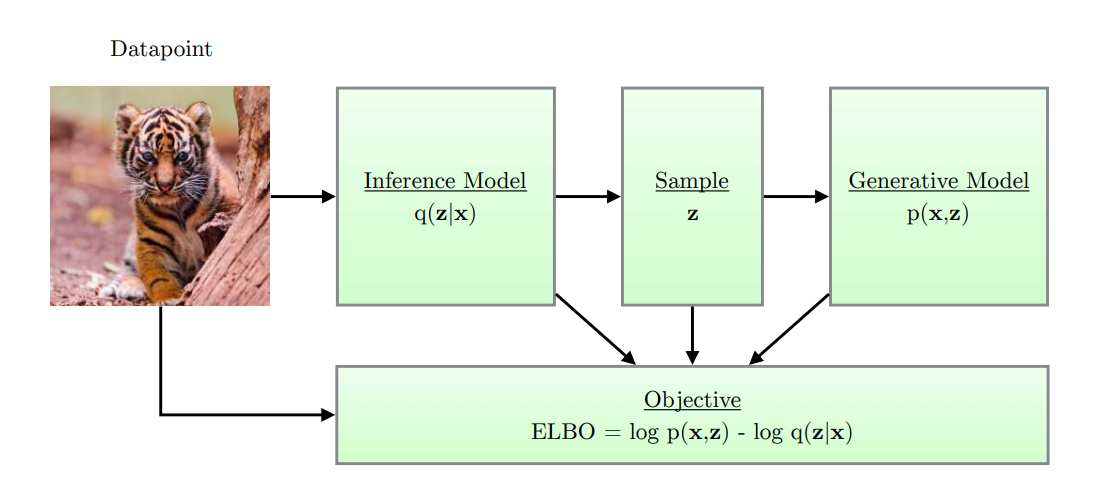
Figure: Simple schematic of computational flow in a variational autoencoder.
Two for One
it can be understood that maximization of the ELBO w.r.t the parameters
, will concurrently optimize the two things we care about:
- It will approximately maximize the marginal likelihood
. This means that our generative model will become better.
- It will minimize the KL divergence of the approximation
II. Variational Autoencoders
A variational auto-encoder is a deep latent variable model where:
- The prior
is prescribed, and usually chosen to be Gaussian.
-
The likelihood
is parameterized with a generative network
(or decoder) that takes as input
to the data distribution.
- The approximate posterior
is parameterized with an inference network
(or encoder) that takes as input
to the approximate posterior.
Stochastic Gradient-Based Optimization of the ELBO
As before, we can use variational inference, but to jointly optimize the generative and the inference networks parameters and
.
We want
Given a dataset with i.i.d. data, the ELBO objective is the sum (or average) of individual-datapoint ELBO’s:
The individual-datapoint ELBO, and its gradient is, in general, intractable. However, good unbiased estimators
exist, as we will show, such that we can still perform minibatch SGD.
Unbiased gradients of the ELBO w.r.t. the generative model parameters are simple to obtain:
Unbiased gradients w.r.t. the variational parameters are more difficult to obtain, since the ELBO’s expectation is taken w.r.t. the distribution
, which is a function of
. I.e., in general:
In the case of continuous latent variables, we can use a reparameterization trick for computing unbiased estimates of , as
we will now discuss.
Reparameterization Trick
For continuous latent variables and a differentiable encoder and generative model, the ELBO can be straightforwardly differentiated w.r.t. both
and
through a change of variables, also called the reparameterization trick.
Change of variables
First, we express the random variable as some differentiable
(and invertible) transformation of another random variable
, given
and
:
where the distribution of random variable is independent of
or
.
Gradient of expectation under change of variable
Given such a change of variable, expectations can be rewritten in terms
of
where and the expectation and gradient operators become
commutative, and we can form a simple Monte Carlo estimator:
where in the last line, with random noise sample
.
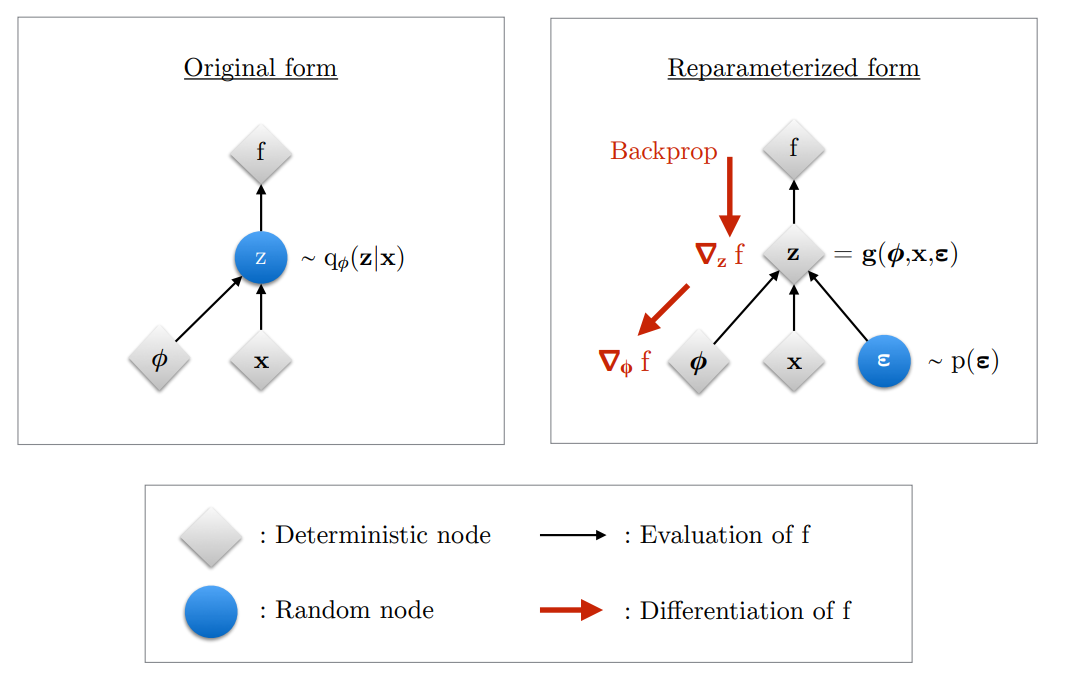
Figure: Illustration of the reparameterization trick. The variational parameters affect the objective
through the random variable
. We wish to
compute gradients
to optimize the objective with SGD. In the original form
(left), we cannot differentiate
w.r.t.
, because we cannot directly backpropagate
gradients through the random variable
. We can “externalize” the randomness in
by re-parameterizing the variable as a deterministic and differentiable function of
,
, and a newly introduced random variable
. This allows us to “backprop through
”, and compute gradients
.
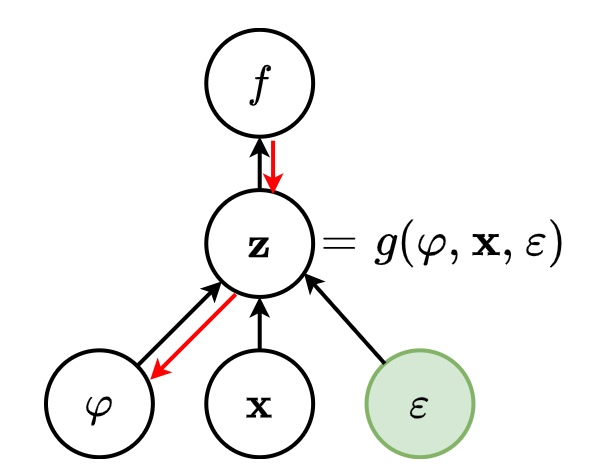
For example, if , where
and
are the outputs of the inference network
, then a common reparameterization is:
Given such a change of variable, the ELBO can be rewritten as:
Therefore,
which we can now estimate with Monte Carlo integration.
The last required ingredient is the evaluation of the likelihood given the change of variable
. As long as
is invertible, we have:
The Jacobian matrix contains all first derivatives of the transformation from to
:
Example
Consider the following setup:
- Generative model:
- Inference model
Note that there is no restriction on the generative and inference network architectures. They could as well be arbitrarily complex convolutional networks.
Plugging everything together, the objective can be expressed as:
where the KL divergence can be expressed analytically as
which allows to evaluate its derivative without approximation.
III. Sample Python implementation
# Base Variational Autoencoder
from torch import nn
from abc import abstractmethod
class BaseVAE(nn.Module):
def __init__(self) -> None:
super(BaseVAE, self).__init__()
def encode(self, input: Tensor) -> List[Tensor]:
raise NotImplementedError
def decode(self, input: Tensor) -> Any:
raise NotImplementedError
def sample(self, batch_size:int, current_device: int, **kwargs) -> Tensor:
raise NotImplementedError
def generate(self, x: Tensor, **kwargs) -> Tensor:
raise NotImplementedError
@abstractmethod
def forward(self, *inputs: Tensor) -> Tensor:
pass
@abstractmethod
def loss_function(self, *inputs: Any, **kwargs) -> Tensor:
pass
class VanillaVAE(BaseVAE):
def __init__(self,
in_channels: int,
latent_dim: int,
hidden_dims: List = None,
**kwargs) -> None:
super(VanillaVAE, self).__init__()
self.latent_dim = latent_dim
modules = []
if hidden_dims is None:
hidden_dims = [32, 64, 128, 256, 512]
# Build Encoder
for h_dim in hidden_dims:
modules.append(
nn.Sequential(
nn.Conv2d(in_channels, out_channels=h_dim,
kernel_size= 3, stride= 2, padding = 1),
nn.BatchNorm2d(h_dim),
nn.LeakyReLU())
)
in_channels = h_dim
self.encoder = nn.Sequential(*modules)
self.fc_mu = nn.Linear(hidden_dims[-1]*4, latent_dim)
self.fc_var = nn.Linear(hidden_dims[-1]*4, latent_dim)
# Build Decoder
modules = []
self.decoder_input = nn.Linear(latent_dim, hidden_dims[-1] * 4)
hidden_dims.reverse()
for i in range(len(hidden_dims) - 1):
modules.append(
nn.Sequential(
nn.ConvTranspose2d(hidden_dims[i],
hidden_dims[i + 1],
kernel_size=3,
stride = 2,
padding=1,
output_padding=1),
nn.BatchNorm2d(hidden_dims[i + 1]),
nn.LeakyReLU())
)
self.decoder = nn.Sequential(*modules)
self.final_layer = nn.Sequential(
nn.ConvTranspose2d(hidden_dims[-1],
hidden_dims[-1],
kernel_size=3,
stride=2,
padding=1,
output_padding=1),
nn.BatchNorm2d(hidden_dims[-1]),
nn.LeakyReLU(),
nn.Conv2d(hidden_dims[-1], out_channels= 3,
kernel_size= 3, padding= 1),
nn.Tanh())
def encode(self, input: Tensor) -> List[Tensor]:
"""
Encodes the input by passing through the encoder network
and returns the latent codes.
:param input: (Tensor) Input tensor to encoder [N x C x H x W]
:return: (Tensor) List of latent codes
"""
result = self.encoder(input)
result = torch.flatten(result, start_dim=1)
# Split the result into mu and var components
# of the latent Gaussian distribution
mu = self.fc_mu(result)
log_var = self.fc_var(result)
return [mu, log_var]
def decode(self, z: Tensor) -> Tensor:
"""
Maps the given latent codes
onto the image space.
:param z: (Tensor) [B x D]
:return: (Tensor) [B x C x H x W]
"""
result = self.decoder_input(z)
result = result.view(-1, 512, 2, 2)
result = self.decoder(result)
result = self.final_layer(result)
return result
def reparameterize(self, mu: Tensor, logvar: Tensor) -> Tensor:
"""
Reparameterization trick to sample from N(mu, var) from
N(0,1).
:param mu: (Tensor) Mean of the latent Gaussian [B x D]
:param logvar: (Tensor) Standard deviation of the latent Gaussian [B x D]
:return: (Tensor) [B x D]
"""
std = torch.exp(0.5 * logvar)
eps = torch.randn_like(std)
return eps * std + mu
def forward(self, input: Tensor, **kwargs) -> List[Tensor]:
mu, log_var = self.encode(input)
z = self.reparameterize(mu, log_var)
return [self.decode(z), input, mu, log_var]
def loss_function(self,
*args,
**kwargs) -> dict:
"""
Computes the VAE loss function.
KL(N(\mu, \sigma), N(0, 1)) = \log \frac{1}{\sigma} + \frac{\sigma^2 + \mu^2}{2} - \frac{1}{2}
:param args:
:param kwargs:
:return:
"""
recons = args[0]
input = args[1]
mu = args[2]
log_var = args[3]
kld_weight = kwargs['M_N'] # Account for the minibatch samples from the dataset
recons_loss =F.mse_loss(recons, input)
kld_loss = torch.mean(-0.5 * torch.sum(1 + log_var - mu ** 2 - log_var.exp(), dim = 1), dim = 0)
loss = recons_loss + kld_weight * kld_loss
return {'loss': loss, 'Reconstruction_Loss':recons_loss.detach(), 'KLD':-kld_loss.detach()}
def sample(self,
num_samples:int,
current_device: int, **kwargs) -> Tensor:
"""
Samples from the latent space and return the corresponding
image space map.
:param num_samples: (Int) Number of samples
:param current_device: (Int) Device to run the model
:return: (Tensor)
"""
z = torch.randn(num_samples,
self.latent_dim)
z = z.to(current_device)
samples = self.decode(z)
return samples
def generate(self, x: Tensor, **kwargs) -> Tensor:
"""
Given an input image x, returns the reconstructed image
:param x: (Tensor) [B x C x H x W]
:return: (Tensor) [B x C x H x W]
"""
return self.forward(x)[0]
IV. References
-
From Autoencoder to Beta-VAE,
https://lilianweng.github.io/posts/2018-08-12-vae/?fbclid=IwAR3-2GNNEw1dv7oHshWhMfB9F9wym4nMHtu1VZc1pOvlC1Qq_ZBOXN2H0ag -
Diederik P. Kingma, Max Welling, An Introduction to Variational Autoencoders
-
Diederik P Kingma, Max Welling, Auto-Encoding Variational Bayes, ICLR 2014
-
Lecture 10: Auto-encoders and variational auto-encoders, https://github.com/glouppe/info8010-deep-learning